What are the Key Factors in Motor Control Protection Device Coordination?

The National Electric Code (NEC) Article 430 provides guidelines for the protection of motors and their control circuits in electrical systems. This article covers the requirements for overcurrent protection devices, such as circuit breakers and fuses, that are used to protect motors and their control circuits from damage due to overloading or short-circuits.
The coordination of protective devices in a motor control circuit is important to ensure that the motor is protected from overloading, short-circuits, and other electrical faults. Also, to reduce the potential for equipment damage, guarantee the uninterrupted and risk-free functioning of the electrical system, and cut down on both the amount of downtime and the amount of money spent on repairs.
Protection coordination in motor control circuits is the process of arranging overcurrent protection devices, such as fuses and circuit breakers, in such a way that each device operates at its intended time and current level in the event of a fault or overloading condition. This is done so that the circuit can continue to function normally.
Related Article: What is Selective Coordination?
Protection coordination in motor control circuits is typically attained by selecting overcurrent protection devices with the appropriate current ratings and time-current characteristics, and then arranging the devices in a particular order based on the trip settings of each individual device. This is done in order to ensure that the desired level of protection is maintained. The devices that are located further away from the problem should have longer trip times and higher current ratings, while the devices that are located closer to the fault should have shorter trip times.
.png)
The following are some of the key factors to consider in coordinating these devices:
𝐌𝐨𝐭𝐨𝐫 𝐅𝐮𝐥𝐥 𝐋𝐨𝐚𝐝 𝐀𝐦𝐩𝐬 (𝐅𝐋𝐀) - The FLA of a motor is the maximum current that the motor is expected to draw when running at its full load capacity. This information is used to determine the size of the overcurrent protective device (OCPD) that should be used to protect the motor.
𝐂𝐢𝐫𝐜𝐮𝐢𝐭 𝐁𝐫𝐞𝐚𝐤𝐞𝐫 𝐑𝐚𝐭𝐢𝐧𝐠 (𝐈𝐧) - It is the maximum amount of electrical current that a circuit breaker is designed to safely carry and interrupt.
𝐌𝐨𝐭𝐨𝐫 𝐒𝐭𝐚𝐫𝐭𝐢𝐧𝐠 𝐂𝐮𝐫𝐫𝐞𝐧𝐭 (𝐈𝐬) - The starting current is the peak current that the motor draws when it first starts. This current can be much higher than the full-load current and can last for several cycles of the AC power supply. The starting current is an important factor to consider because it can cause temporary overloading. We need to ensure that the circuit could not experience nuisance tripping while it is fully protected.
𝐊𝐢𝐥𝐨 𝐀𝐦𝐩𝐞𝐫𝐞 𝐈𝐧𝐭𝐞𝐫𝐫𝐮𝐩𝐭𝐢𝐧𝐠 𝐂𝐚𝐩𝐚𝐜𝐢𝐭𝐲 (𝐊𝐀𝐈𝐂) - It is a rating used to describe the interrupting capacity of a circuit breaker or other overcurrent protective device. The KAIC rating indicates the maximum short-circuit current that the device is able to interrupt without damage.
𝐓𝐡𝐞𝐫𝐦𝐚𝐥 𝐎𝐯𝐞𝐫𝐥𝐨𝐚𝐝 𝐑𝐚𝐭𝐢𝐧𝐠 - Thermal overloads are protective devices that detect the temperature of the motor winding and trip the circuit if the temperature exceeds a certain level. The thermal overload rating is the maximum current that the overload is designed to handle without tripping. The exact percentage setting of thermal overload depends on a variety of factors, including the type of motor, the type of load it is driving, and the ambient temperature conditions. Typically, it should be set within 105% to 120% of the motor current rating.
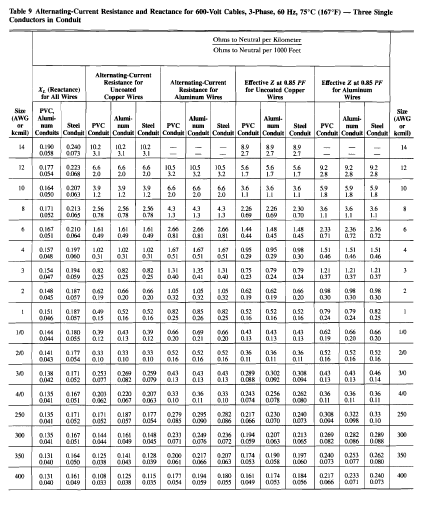
𝐂𝐚𝐛𝐥𝐞 𝐃𝐚𝐦𝐚𝐠𝐞 𝐂𝐮𝐫𝐯𝐞 - Also known as Cable Thermal Withstand Limit. The cable damage curve is a graphical representation of the relationship between the amount of current that flows through a cable and the time it takes for the cable to suffer irreversible damage. The curve is used to determine the maximum current that can flow through a cable for a specified time without causing damage. The OCPD and thermal overloads should be coordinated with the cable damage curve to ensure that the cable is protected from damage in the event of fault.
Related Article: How to Perform Coordination Study of OCPD and Cable in Electrical Design?
It is essential to ensure that the protection devices in a motor control circuit are properly coordinated with one another in order to ensure that the electrical system operates safely and reliably, as well as to minimize the risk of damage to equipment and downtime in the event of a fault or overloading condition. When trying to identify the optimum level of protection coordination for a particular application, it is best to seek the advice of a Professional Engineer.


.webp)









No comments: